Deel 2, de kuip en de aandrijving.
Een project van Jan van Acker

Tiger 1 schaal 1 :10
Na het gieten en assembleren van de loopwielen (zie part 1) komt nu de kuip en de aandrijving aan de beurt:
- De kuip.
Nu de loopwielen, aandrijfwielen en tracks klaar zijn moeten die natuurlijk ook kunnen draaien, daarvoor is een stevige kuip nodig:
 De zijplaten, 8mm dik, klaar voor verwerking
De zijplaten, 8mm dik, klaar voor verwerking
De zijwanden zijn op maat gezaagd in platen aluminium van 8 mm dik, de gaten voor alle wielen worden eerst afgetekend daarna geboord en op maat gebracht.
De voor en achterkant alsook de bovenbouw wordt volledig uit alu-plaat van 4mm dik gezaagd. Wel nogal wat meet en tekenwerk; maar het zagen zelf valt nogal mee. Ik gebruik daarvoor een standaard decoupeerzaag. Met een aangepast zaagblad kan je hiermee quasi alle vormen zagen.
De zijwanden van 8mm dikte heb ik grotendeels met de hand gezaagd, daar was wel wat werk (zweet) aan,.. Voor de frontplaat, waar de mitrailleur en de driveruitkijk zit, heb ik 2 identieke platen van elk 4mm op elkaar gelijmd en op maat gebracht.
De bodemplaat van 4mm dikte wordt direct op de onderzijde van de zijplaten gevezen en met voldoende 3mm bouten vastgezet. De zijplaten zijn immers met 8mm breed genoeg om te boren en met M3 te tappen.
De bovenste zijplaten worden d.m.v. L profielen aan elkaar vastgevezen; De volledige onderbouw wordt dan oersterk en het gewicht valt (voorlopig) binnen de perken.
De vijsjes die zichtbaar zijn worden diep genoeg “gesouvereind” en in een later stadion met epoxylijm dicht gegoten en gelijk geschuurd. Eens overschilderd ontstaat een vlakke wand zonder zichtbare vijskoppen.
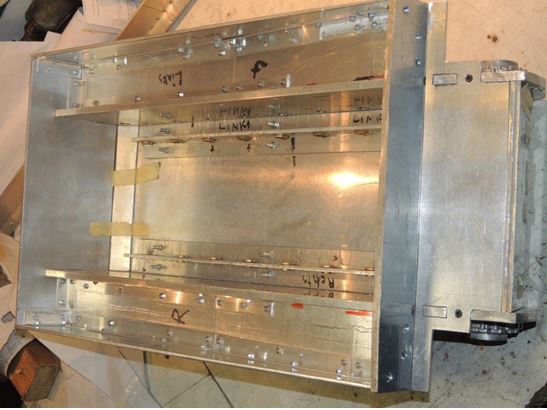
De ruwbouw van de kuip is praktisch klaar.
Na de assemblage van de kuip heb ik de binnenkant in wit gespoten; dat heeft het voordeel dat latere onderdelen goed zichtbaar blijven,.. curieus hoe dat er uit zal zien na intensief gebruik.
2 De tractiewielen
Nu de kuip grotendeels klaar is kunnen de wielen geplaatst worden. De tractiewielen worden met 12mm aandrijfassen in kogellagers vastgezet. Ik kocht bij Jurgen Stehr de achterste loopwielen (spanwielen) maar ook de “vorgelege” waarin de buitenste kogellager zit van de 12mm aandrijfas zit.

De binnenste kogellagers heb ik telkens op een metaalplaatje gesoldeerd met een stevige 100W soldeerbout en gewoon standaard soldeersel dat werkt uitstekend; via dit plaatje wordt dan de lager dmv M4 vijsjes op de juiste plaats op het binnenste alu profiel van 5mm dikte vastgezet.
dikte vastgezet.
Dit U profiel wordt op zijn beurt vastgeschroefd op de bodemplaat. Beide eindassen draaien zo spelingsvrij. Via een stalen kettingwiel kan dan de kracht van de motoren op de tractiewielen worden overgebracht.
- De montage van de loopwielen en de torsieveringvering
De loopwielen zijn al voorzien van telkens 2 kogellagers en worden op 8 mm assen  gemonteerd. Deze assen worden in een mal haaks gelast op een plaat die op zijn beurt weer haaks op de 8mm wieldraagas wordt gelast. In het einde van de as , waar de loopwielen opgeschoven worden, wordt M3 schroefdraad getapt; dmv een vijs en een rondel wordt voorkomen dat de wielen van de assen glijden.
gemonteerd. Deze assen worden in een mal haaks gelast op een plaat die op zijn beurt weer haaks op de 8mm wieldraagas wordt gelast. In het einde van de as , waar de loopwielen opgeschoven worden, wordt M3 schroefdraad getapt; dmv een vijs en een rondel wordt voorkomen dat de wielen van de assen glijden.
In de kuip worden de 12mm gaten voor de lagers van de wieldraagassen aangebracht. In deze gaten wordt telkens een bronzen lagerbus van 12/8mm gelijmd elke lagerbus is van een kraag voorzien. Door de kuipwanddikte van 8mm van de kuip blijft er nog net genoeg ruimte over om een passende “O” ring aan de binnenkant van de kuip toe te voegen; een stelring voorkomt dat de zaak er uit kan floepen en zorgt samen met een passende rondel, door de blokkering van de O ring, tevens voor een waterdichte afsluiting.
De wieldraagassen worden een tweede keer aan de binnenkant van de kuip weerom met een bronden bus gelagerd. Elke as heeft hierdoor 2 lagerpunten en beperkt zo de speling van elk wiel (wielspoor) tot een minimum. Aan het binneneind van elke loopwielas wordt telkens een torsiestaaf vastgemaakt van 2,5 mm voor de binnenste en een torsiestaaf van 3mm voor de voorste en achterste loopwielen. Elke torsiestaaf wordt haaks omgezet en enerzijds in een dwars boorgat van de wieldraagarm en anderzijds op de bodemplaat vastezet. Deze torsie vering zorgt voor een realistisch; identiek aan het origineel, rijgedrag.
telkens een torsiestaaf vastgemaakt van 2,5 mm voor de binnenste en een torsiestaaf van 3mm voor de voorste en achterste loopwielen. Elke torsiestaaf wordt haaks omgezet en enerzijds in een dwars boorgat van de wieldraagarm en anderzijds op de bodemplaat vastezet. Deze torsie vering zorgt voor een realistisch; identiek aan het origineel, rijgedrag.
- De achterwielen en het spansysteem
Aangezien de tracks op een correcte spanning moeten kunnen worden gebracht en wetende dat alle loopwielen en tractiewielen vast gepositioneerd staan, kan dus alleen een verplaatsbaar achterwiel de spanning van de tracks aanpassen.
De achterwielen zitten met kogellagers op de eindas van 12mm. Deze as zit op haar beurt weer haaks gelagerd in de kuip. De as in de kuip is met een 6mm as dwars doorgeboord. Door deze 6mm as naar voor of achter te bewegen wordt dus het achterwiel mee verplaatst. Deze verplaatsing zorgt voor meer of minder spanning op de tracks.
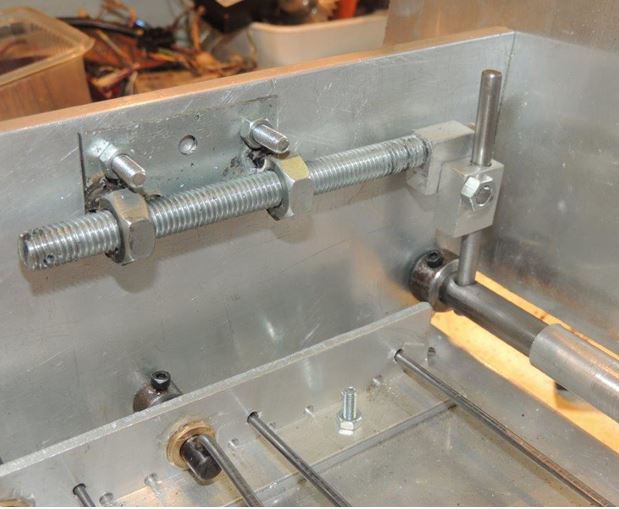
Een schroefdraadstang M8 die doorheen 2 M8 bouten loopt, vastgelast op een metalen bevestigingsplaat die tegen de zijwanden vastgeschroefd wordt, verplaatst via een scharniermechanisme, de 6mm as doorheen de eindas. Op het eind van de schroefdraadstang heb ik een sleuf en enkele gaatjes geboord; hierdoor kan de bout in of uit geschroefd worden en dus meer of minder spanning op de tracks gezet en zo kan de juiste spanning gemakkelijk ingesteld worden.
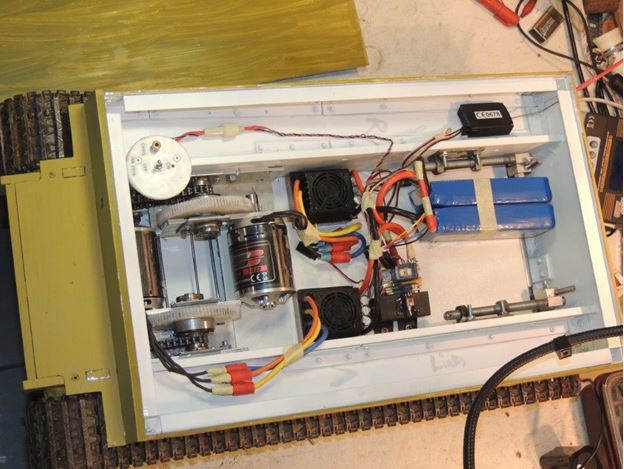
De beide binnenassen van de achterwielen worden dmv een holle as met elkaar verbonden; hierdoor vermijd ik speling en kunnen ze toch onafhankelijk van elkaar worden ingesteld. Dit lijkt allemaal wat ingewikkeld maar de foto verklaart alles,…
- De aandrijving
- Motoren en vertragingBij al mijn vorige projecten heb ik altijd met brushed of borstel motoren gewerkt; gemakkelijk te regelen, niet te hoog toerental, hoog koppel en lage kostprijs; ideaal dus voor tanks zeker als de afmetingen en gewicht niet zo belangrijk zijn. Toch viel mijn oog op de hoogrendement brushless motoren, die leveren nl. tot 30% meer power voor identieke afmetingen… Na enig studiewerk kwam ik op de Turnigy Aerodrive SK3 – 6374-149 KV brushless outrunner van Hobbyking uit. Met ongeveer 70€ per stuk niet echt goedkoop, maar de kenmerken zagen er veelbelovend uit,…Max 70A of 2200 Watt per motor,… met 2 motoren dus meer dan 4 Kw (dus bijna 6 PK!),.. Over spierballen gesproken..
http://www.hobbyking.com/hobbyking/store/__18184__Turnigy_Aerodrive_SK3_6374_149kv_Brushless_Outrunner_Motor.html
Met een gewicht van 840 gr/motor en qua afmetingen net niet te groot voor inbouw leek dit een acceptabele oplossing. Daar ik nog nooit met brushless moteren –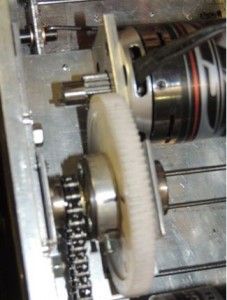 outrunners had gewerkt was dit een wel hele opgave. De lage 149 KV versie zou dus theoretisch, bij 24 Volt zo’n 3500 tpm draaien. De nodige reductie is dan met 1 tussenstap realiseerbaar,.. Als batterij gebruik ik voorlopig 6 cellen Li/Po van elk 5A/H, vertrekkende van 22,2 V (4,2V * 6 cellen) en om een realistische snelheid van ongeveer 6 km/u te halen moet de totale verhouding dus 1:9 zijn.
outrunners had gewerkt was dit een wel hele opgave. De lage 149 KV versie zou dus theoretisch, bij 24 Volt zo’n 3500 tpm draaien. De nodige reductie is dan met 1 tussenstap realiseerbaar,.. Als batterij gebruik ik voorlopig 6 cellen Li/Po van elk 5A/H, vertrekkende van 22,2 V (4,2V * 6 cellen) en om een realistische snelheid van ongeveer 6 km/u te halen moet de totale verhouding dus 1:9 zijn.

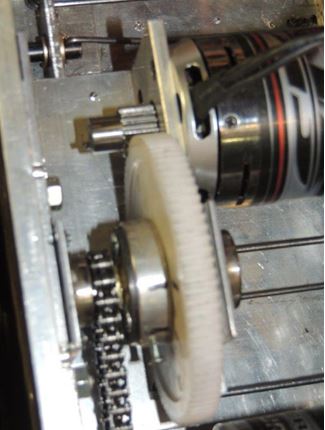

Na wat zoekwerk heb ik via Conrad 2 sets M1 tandwielen gekocht. De motorrondsels in staal met 15 tanden en de grote tandwielen in nylon met 90 tanden.
Een sterk 5mm dik U profiel dient als steun voor de motor en de eerste trap.
Als tweede trap heb ik telkens een kettingtandwiel met 15 tanden vastgemaakt op het grote 90- tanden tandwiel, en tussen 2 lagers geplaatst.
tanden tandwiel, en tussen 2 lagers geplaatst.
Dit kettingtandwiel drijft dan via een stalen rollenketting van 6mm de aandrijfas met de tractiewielen aan waarop een kettingwiel van 24 tanden vastzit, en zo dus ook de tracks. Werkt voorlopig uitstekend,.. De totale overbrenging wordt dan 15/90 – 15/24 dus : 9,6
De volledige motor met de eerste vertragingstrap worden op de juiste plaats tegen de zijwend geschroefd,.. unit uitbouwen duurt minder dan 5 minuten,..
- Regelaars
Tja, die brushless moteren hebben specifieke regelaars nodig; daarbij moeten de motoren zowel vooruit als achteruit kunnen draaien en liefst zo’n hoog mogelijke spanning kunnen verwerken; de motoren verdragen tot wel 44V.
De meeste regelaars zijn enkel geschikt om in één richting te draaien en voor lagere spanningen (meestal 2 à 4 LiPo cellen), daarom heb ik eerst met een goedkopere 180A/6cell versie geëxperimenteerd. Voor de achteruit heb ik een relaissturing ontwikkeld die 2 van de 3 aansluitdraden naar de motor ompoolt en daardoor de motor in de andere richting doet draaien. Ik had hiervoor ook een beveiligingsschakeling ontwikkeld die te allen tijde kon vermijden dat dit relais ongewenst zou kunnen geactiveerd worden want, bij vol vermogen, brand dan de zaak gegarandeerd kapot. Eens alles operationeel stelde ik helaas vast dat extra regelaars (tijdelijk) niet meer leverbaar waren (ik had er maar 1 gekocht).
Terug op zoek dus,.. tot ik de HobbyKing 150A forward reverse brushless Car ESC tegenkwam. Deze kunnen elk 150A verwerken en zijn voorzien van vooruit/achteruit en kunnen tot 6 cellen aan.
Hiervan 2 regelaars bestelt (72€/stuk) samen met een programeerkaart en ja, na enkele weken kon de inbouw en afregeling van de aandrijfunit beginnen.
De eerste tests “on the field” zien er veelbelovend uit,… snelheid OK, zo’n 6 km/u en vooral power zat! Een echte Tiger waardig dus!
De voorlopige stand van zaken,… “and off she goes,”… de ijzeren tracks beginnen al lekker te roesten,…
Op naar het volgende hoofdstuk,.. de bovenbouw, toren en de afwerking,…
Wordt vervolgd,..
Jan Van Acker, 11/2015